

ກະດານອັດຕະໂນມັດ Bender HMBC2202-2203
ສະເພາະຜະລິດຕະພັນ
| ບໍ່. | ຊື່ | ພາລາມິເຕີ | ໜ່ວຍ |
| 1 | ຄວາມຍາວສູງສຸດ | 2200 | mm |
| 2 | ຄວາມກວ້າງສູງສຸດ | 1500 | mm |
| 3 | ຕ່ຳສຸດຄວາມຍາວຂອງງໍ | ໑໓໐ | mm |
| 4 | ຄວາມກວ້າງຂັ້ນຕ່ຳ | 240 | mm |
| 5 | ຄວາມຫນາສູງສຸດຂອງແຜ່ນເຫຼັກ (MS , UTS410N/mm² ) | 2 | mm |
| 6 | ຄວາມໜາຂັ້ນຕ່ຳ (MS , UTS410N/mm²) | 0.35 | mm |
| 7 | ຄວາມສູງໂຄ້ງສູງສຸດ | 200 | mm |
| 8 | ຮູບແບບການປັບຄວາມຍາວຂອງກົດເທິງ | ອັດຕະໂນມັດ | |
| 9 | ການບໍລິໂພກພະລັງງານສະເລ່ຍ | 4 | KW |
| 10 | ຂະໜາດຂອງການຄາດຄະເນ: L*W*h | 6100*2700*2920 | mm |
ສະເພາະຜະລິດຕະພັນ
| ບໍ່. | ຊື່ | ພາລາມິເຕີ | ໜ່ວຍ |
| 1 | ຄວາມຍາວສູງສຸດ | 2200 | mm |
| 2 | ຄວາມກວ້າງສູງສຸດ | 1500 | mm |
| 3 | ຕ່ຳສຸດຄວາມຍາວຂອງງໍ | 430 | mm |
| 4 | ຄວາມກວ້າງຂັ້ນຕ່ຳ | 350 | mm |
| 5 | ຄວາມຫນາສູງສຸດຂອງແຜ່ນເຫຼັກ (ສະແຕນເລດ, UTS660N/ມມ) | 1.8(+-90°) | mm |
| 6 | ຄວາມຫນາສູງສຸດຂອງແຜ່ນເຫຼັກ (ເຫຼັກກ້າ, UTS410N/mm) | 3(+-90 °) | mm |
| 8 | ຄວາມຫນາຕ່ໍາສຸດ (ອາລູມິນຽມ, UTS120N/mm) | 0.35 | mm |
| 9 | ຄວາມສູງໂຄ້ງສູງສຸດ | 300 | mm |
| 10 | ຮູບແບບການປັບຄວາມຍາວຂອງກົດເທິງ | ອັດຕະໂນມັດ | |
| 11 | ການບໍລິໂພກພະລັງງານສະເລ່ຍ | 12 | KW |
| 12 | ນ້ຳໜັກ | 32 | T |
| 13 | ຂະໜາດຂອງການຄາດຄະເນ: L*W*h | 6300*5500*3300 | mm |
ລັກສະນະແລະໂຄງສ້າງຕົ້ນຕໍ
ໃນດ້ານການອອກແບບເຄື່ອງຈັກແລະການຜະລິດ, He Bei Han Zhin CNC Machinery Co., Ltd.ຕົ້ນຕໍແມ່ນສຸມໃສ່ຈຸດດັ່ງຕໍ່ໄປນີ້:
1.ແນວຄວາມຄິດຕະຫຼາດຂອງ pursuing ການປະຕິບັດແລະປະຫຍັດເງິນທຸກ penny ສໍາລັບຜູ້ໃຊ້;
2.ຄວາມຄິດອອກແບບທີ່ເຊື່ອຖືໄດ້ຫຼາຍແລະຊັດເຈນ;
3. ວັດຖຸດິບທີ່ມີຄຸນນະພາບສູງ, ພາກສ່ວນພາຍນອກແລະເຕັກໂນໂລຢີການປຸງແຕ່ງ exquisite;
4. ເນັ້ນຫນັກໃສ່ຄວາມສະດວກສະບາຍແລະຄວາມປອດໄພຂອງການນໍາໃຊ້ແລະການບໍາລຸງຮັກສາຫຼາຍຂຶ້ນ;
5. ອັດຕາການບໍາລຸງຮັກສາຕ່ໍາແລະຄ່າໃຊ້ຈ່າຍໃນການບໍາລຸງຮັກສາໃນອຸດສາຫະກໍາດຽວກັນ.
ກອບ
A. ສ້າງຕັ້ງຮູບແບບອົງປະກອບ finite ສາມມິຕິ: ອີງຕາມຕົວແບບແຂງສາມມິຕິລະດັບທີ່ພັດທະນາແລະອອກແບບ, ສ້າງຕັ້ງຕົວແບບເຄື່ອນໄຫວອົງປະກອບ finite ສໍາລັບການຄິດໄລ່.ຮູບແບບພິຈາລະນາອົງປະກອບຕົ້ນຕໍກ່ຽວກັບການເຊື່ອມຕໍ່ການສົ່ງຜົນບັງຄັບໃຊ້.ກໍາລັງຖືກສົ່ງກັບການສະຫນັບສະຫນູນໂດຍຜ່ານພາກສ່ວນເຊື່ອມຕໍ່, ແລະຫຼັງຈາກນັ້ນການວິເຄາະຄວາມເຂັ້ມແຂງຂອງການສະຫນັບສະຫນູນແມ່ນດໍາເນີນ.
B. ການວິເຄາະຜົນການວິເຄາະສະຖິດ: ເນື່ອງຈາກຄວາມໄວການປຸງແຕ່ງຊ້າ, ການວິເຄາະຄວາມເຂັ້ມແຂງສາມາດຖືວ່າເປັນບັນຫາ static.ອີງຕາມການໂຫຼດກົດແຜ່ນແລະການໂຫຼດໂຄ້ງໃນທິດທາງຕັ້ງຂອງຫົວເຄື່ອງຕັດ, ຜົນໄດ້ຮັບຄວາມກົດດັນແລະການຜິດປົກກະຕິແມ່ນສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້.ຄວາມກົດດັນສູງສຸດຈະປາກົດຢູ່ໃນຄໍຂອງ fuselage, ຄວາມກົດດັນສູງສຸດແມ່ນ 21.2mpa, ການຜິດປົກກະຕິສູງສຸດຈະປາກົດຢູ່ປາຍສຸດຂອງ fuselage, ແລະການຜິດປົກກະຕິສູງສຸດແມ່ນ 0.30mm.
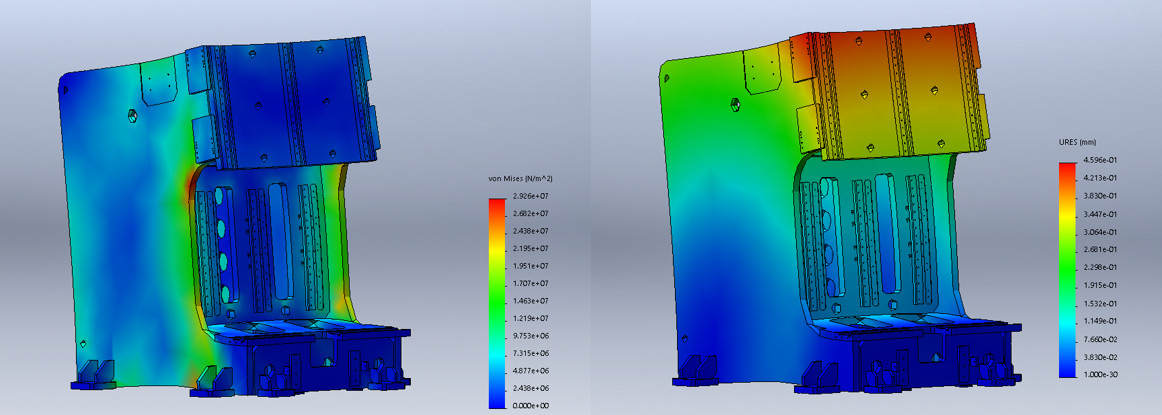
ອີງຕາມຜົນໄດ້ຮັບຂອງການວິເຄາະອົງປະກອບ finite ຂອງກອບ, ເຫຼັກ Q345 ຖືກເລືອກເປັນວັດສະດຸ;ການເຊື່ອມໂລຫະກາກບອນໄດອອກໄຊ;ປະຕິບັດການປິ່ນປົວ tempering ເພື່ອລົບລ້າງຄວາມກົດດັນທີ່ເກີດຈາກການເຊື່ອມ;ດັ່ງນັ້ນເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງ, ຄວາມຫມັ້ນຄົງແລະຄວາມເຂັ້ມແຂງສູງຂອງອຸປະກອນສໍາລັບການດໍາເນີນງານໃນໄລຍະຍາວ.
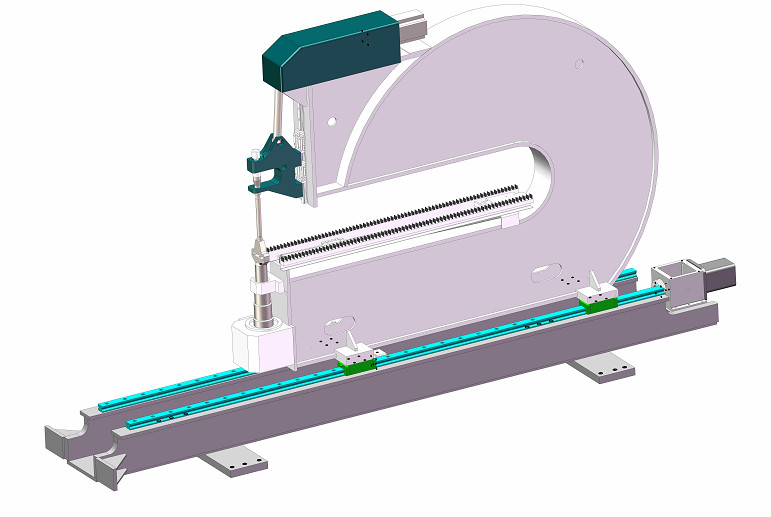
ram ເທິງ
ພາກສ່ວນນີ້ແມ່ນສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍ ram, ສະກູນໍາ torque ສູງ, reducer, ຄູ່ມື rail, servo motor, ແລະອື່ນໆ ໄດຕົ້ນຕໍແມ່ນຄວບຄຸມໂດຍ servo motor, ແລະຮູບແບບການຄວບຄຸມແມ່ນການຄວບຄຸມ servo synchronous, ປະສິດທິພາບສາມາດຮັບປະກັນຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງ, ໄວ. ຄວາມໄວແລະການຄວບຄຸມສູງ.ການຫລໍ່ລື່ນຂອງສະກູນໍາແລະທາງລົດໄຟຄູ່ມືຮັບຮອງເອົາການຫລໍ່ລື່ນອັດຕະໂນມັດ, ແລະນໍ້າມັນແມ່ນ 00#, ເພື່ອຮັບປະກັນຊີວິດການບໍລິການແລະຄວາມຖືກຕ້ອງຂອງ screw ນໍາແລະຄູ່ມື rail ສໍາລັບການດໍາເນີນງານເວລາດົນນານ.
ການວິເຄາະຜົນການວິເຄາະ static ຂອງ slider ເທິງ: nephogram displacement ຄວາມກົດດັນຂອງ worktable ເທິງສະແດງໃຫ້ເຫັນວ່າຄວາມກົດດັນສູງສຸດປາກົດຢູ່ດ້ານເທິງຂອງສ່ວນເທິງ, ຄວາມກົດດັນສູງສຸດແມ່ນ 152mpa, ການຜິດປົກກະຕິສູງສຸດປະກົດຢູ່ປາຍສຸດຂອງເທິງ. ຕາຕະລາງເຮັດວຽກ, ແລະການຜິດປົກກະຕິສູງສຸດແມ່ນ 0.15mm
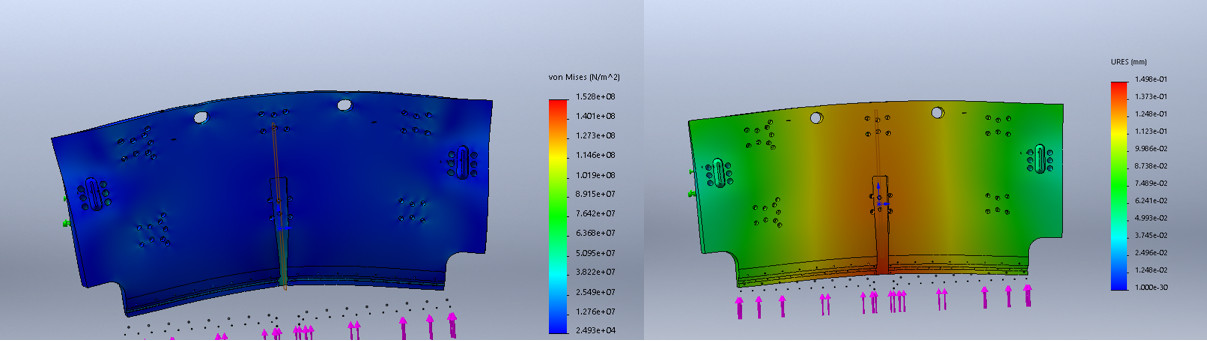
ອີງຕາມຜົນໄດ້ຮັບຂອງການວິເຄາະອົງປະກອບ finite ຂອງ ram, ເຫຼັກ Q345 ຖືກເລືອກເປັນວັດສະດຸ;ການເຊື່ອມໂລຫະກາກບອນໄດອອກໄຊ;ປະຕິບັດການປິ່ນປົວ tempering ເພື່ອລົບລ້າງຄວາມກົດດັນທີ່ເກີດຈາກການເຊື່ອມ;ດັ່ງນັ້ນເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງ, ຄວາມຫມັ້ນຄົງແລະຄວາມເຂັ້ມແຂງສູງຂອງອຸປະກອນສໍາລັບການດໍາເນີນງານໃນໄລຍະຍາວ.
ຫນ່ວຍບິດ
ພາກສ່ວນການຂັບເຄື່ອນພະລັງງານຂອງຫນ່ວຍໂຄ້ງແມ່ນຂັບເຄື່ອນດ້ວຍມໍເຕີ servo ໂດຍບໍ່ມີການເຂົ້າຮ່ວມຂອງລະບົບໄຮໂດຼລິກ, ເຊິ່ງມີປະໂຫຍດຫຼາຍໃນການຫຼຸດຜ່ອນການສວມໃສ່ຂອງອົງປະກອບແລະປະສິດທິພາບການສົ່ງຜ່ານ, ແລະສອດຄ່ອງກັບນະໂຍບາຍການປະຫຍັດພະລັງງານແລະການປົກປ້ອງສິ່ງແວດລ້ອມທີ່ສະຫນັບສະຫນູນໂດຍລັດ.
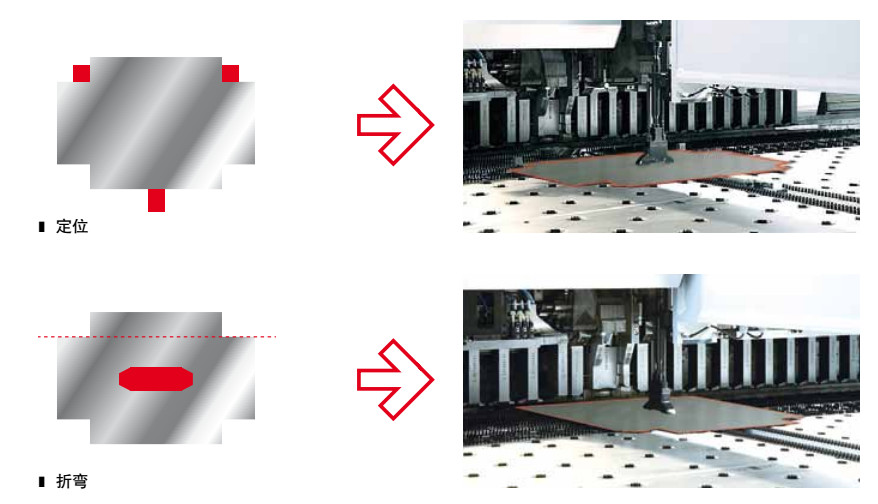
ອີງຕາມການຕັ້ງຄ່າຂໍ້ມູນແຜ່ນ, ລະບົບອັດຕະໂນມັດຄິດໄລ່ຕໍາແຫນ່ງຂອງມີດກົດເທິງ 3, ຄວບຄຸມໄລຍະຫ່າງລະຫວ່າງມີດກົດເທິງ 3 ແລະມີດກົດຕ່ໍາ 4, ແລະແກ້ໄຂແຜ່ນ;ອີງຕາມການຕັ້ງຄ່າລະບົບ, ບໍ່ວ່າຈະເປັນການງໍນີ້ຂຶ້ນຫຼືລົງ, ຄວບຄຸມມີດໂຄ້ງຕ່ໍາ 2 ຫຼືມີດໂຄ້ງເທິງ 1 ເພື່ອເຄື່ອນຍ້າຍຢ່າງໄວວາໄປຫາຕໍາແຫນ່ງງໍ;ອີງຕາມມຸມການຕັ້ງຄ່າທີ່ແຕກຕ່າງກັນ, ສູດການຄິດໄລ່ມຸມທີ່ມີສິດທິບັດຄວບຄຸມດີໃຈຫລາຍທີ່ໂຄ້ງເພື່ອຍ້າຍໄປຫາຕໍາແຫນ່ງການຄິດໄລ່ເພື່ອໃຫ້ສໍາເລັດການບິດ.
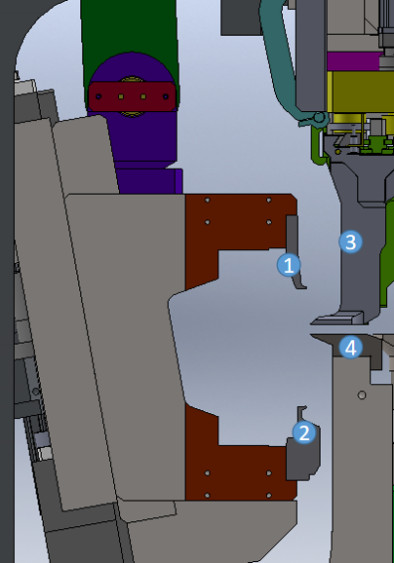
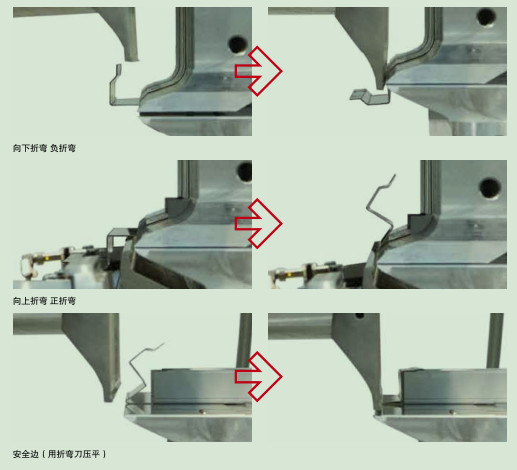
ອີງຕາມວິທີການ bending ທີ່ແຕກຕ່າງກັນ, ມັນສາມາດແບ່ງອອກເປັນ bending ມຸມ, arc ຂະຫນາດໃຫຍ່ bending, flattening bending, ແລະອື່ນໆ.
ໜ່ວຍຂ່າວເທິງ
ຫນ່ວຍງານກົດເທິງ: ເປັນສ່ວນຫນຶ່ງທີ່ຈະນໍາໃຊ້ໃນການປະມວນຜົນໂຄ້ງທັງຫມົດ.HMBC ເຕັມສູນ servo multilateral bending ໄດ້ມີຫນ່ວຍບໍລິການກົດເທິງພິເສດ, ເຊິ່ງສາມາດຕິດຕັ້ງແລະປັບອັດຕະໂນມັດຕາມຄວາມຍາວຂອງແຜ່ນທີ່ແຕກຕ່າງກັນ.
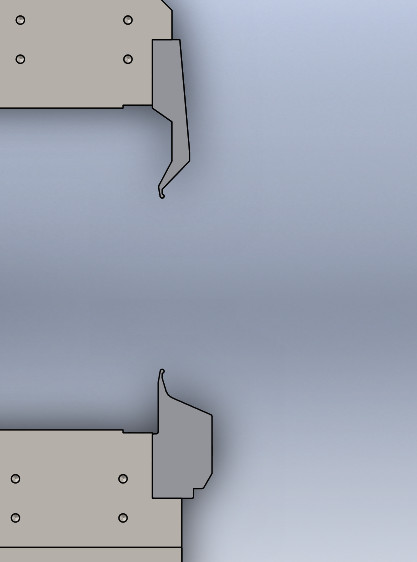
ເຄື່ອງມື
ເຄື່ອງມືບິດໄດ້ຖືກແບ່ງອອກເປັນເຄື່ອງມືບິດເທິງແລະເຄື່ອງມືບິດຕ່ໍາ.ເຄື່ອງມືງໍພິເສດສາມາດປັບແຕ່ງໄດ້ຕາມຄວາມຕ້ອງການທີ່ແຕກຕ່າງກັນຂອງລູກຄ້າ.
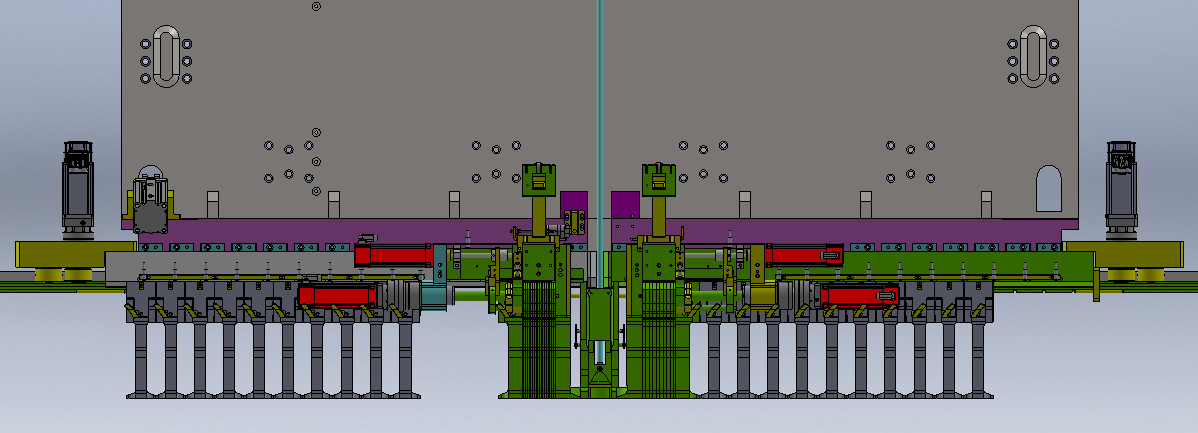
2. ຫນ່ວຍອາຫານຈານ:
ການເຄື່ອນໄຫວ, clamping ແລະການຫມຸນຂອງແຜ່ນໂລຫະແມ່ນຄວບຄຸມໂດຍ manipulator 1, clamp 2 ແລະ rotating disc 3 ຕາມລໍາດັບ.ການໃຫ້ອາຫານຂອງໂລຫະແຜ່ນແມ່ນຄວບຄຸມໂດຍມໍເຕີ servo ໃນຂະບວນການປຸງແຕ່ງທັງຫມົດ, ເພື່ອຮັບຮູ້ອັດຕະໂນມັດແລະການວາງຕໍາແຫນ່ງຢ່າງໄວວາ, ຫຼຸດຜ່ອນເວລາປະຕິບັດງານແລະປັບປຸງປະສິດທິພາບ.ເນື່ອງຈາກການປະດິດສ້າງຂອງໂຄງສ້າງແລະການນໍາໃຊ້ການຄວບຄຸມ servo ຢ່າງເຕັມທີ່, ໃນຂະບວນການເຮັດວຽກທັງຫມົດຂອງສູນໂຄ້ງຫຼາຍຝ່າຍ, ການຍຶດແລະການຫມຸນຂອງແຜ່ນໂລຫະສາມາດຮັກສາຄວາມຖືກຕ້ອງ.ສໍາລັບ workpieces ສະລັບສັບຊ້ອນຫຼາຍແລະແມ້ກະທັ້ງ workpieces polygonal, ຄວາມຖືກຕ້ອງຂອງພືດຫມູນວຽນຢ່າງຕໍ່ເນື່ອງສາມາດຮັບປະກັນໄດ້ 0.001.
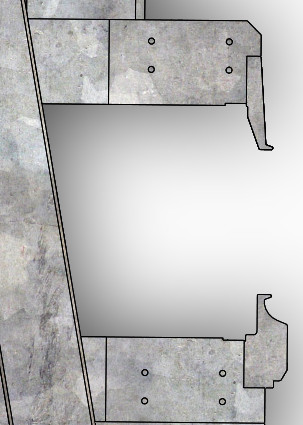
3. ຫນ່ວຍງານຕໍາແຫນ່ງແຜ່ນ:
ຫນ່ວຍຕັ້ງຕໍາແຫນ່ງຂອງແຜ່ນປະກອບດ້ວຍ pin positioning ຊ້າຍ, pin positioning ຂວາ, pin positioning ດ້ານຫນ້າແລະ pin positioning ຫລັງ;pins ຕໍາແຫນ່ງຊ້າຍແລະຂວາສາມາດຊອກຫາຕໍາແຫນ່ງຊ້າຍແລະຂວາຂອງແຜ່ນ.pin ຕໍາແຫນ່ງທາງຫນ້າແລະ pin ຕໍາແຫນ່ງທາງຫລັງຄວບຄຸມຕໍາແຫນ່ງດ້ານຫນ້າແລະຫລັງຂອງແຜ່ນເພື່ອຮັບປະກັນວ່າແຜ່ນແມ່ນຂະຫນານກັບມີດກົດເທິງແລະຕ່ໍາ, ເຊິ່ງຖືກນໍາໃຊ້ເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຂອງແຜ່ນ.
ຫນ່ວຍງານວາງຕໍາແຫນ່ງແຜ່ນສາມາດເຮັດສໍາເລັດການຈັດຕໍາແຫນ່ງອັດຕະໂນມັດຂອງແຜ່ນແລະເຮັດສໍາເລັດອັດຕະໂນມັດຂອງແຜ່ນເຫຼັກຫຼາຍຝ່າຍໃນເວລາດຽວ, ເຊິ່ງເຮັດໃຫ້ໄລຍະເວລາຂອງວົງຈອນງໍສັ້ນລົງຢ່າງຫຼວງຫຼາຍແລະຄວບຄຸມຄວາມຜິດພາດຂອງການຕັດຂອງແຜ່ນໃນການງໍທໍາອິດເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງການບິດ.
4.ລະບົບ CNC
A: ລະບົບ CNC ແລະຊອບແວທີ່ພັດທະນາຮ່ວມກັນສາມາດຖືກນໍາໃຊ້ແລະຄຸ້ມຄອງໄດ້ໄວແລະສະດວກ
B: ຄຸນນະສົມບັດຕົ້ນຕໍ:
ກ).ຮູບແບບການຄວບຄຸມລົດເມ EtherCAT ໄດ້ຖືກຮັບຮອງເອົາ, ມີຄວາມສາມາດຕ້ານການແຊກແຊງທີ່ເຂັ້ມແຂງ
b) ສະຫນັບສະຫນູນການຂຽນໂປລແກລມໂດຍກົງແລະການປ້ອນຂໍ້ມູນໂຄ້ງຂອງແຕ່ລະຂັ້ນຕອນໃນຮູບແບບ
c) ສະຫນັບສະຫນູນ arc bending
d) ການຄວບຄຸມ servo ໄຟຟ້າຢ່າງເຕັມທີ່
e) ສະຫນັບສະຫນູນຫນ້າທີ່ການຊົດເຊີຍການງໍ
f) ສະຫນັບສະຫນູນການທໍາງານຂອງການຂຽນໂປລແກລມສອງມິຕິລະດັບ
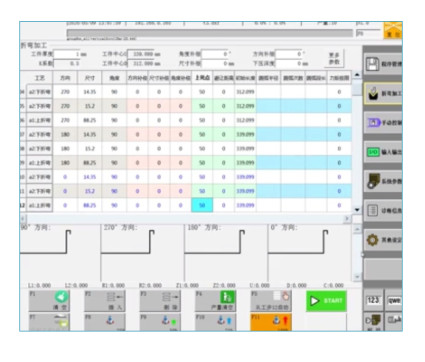
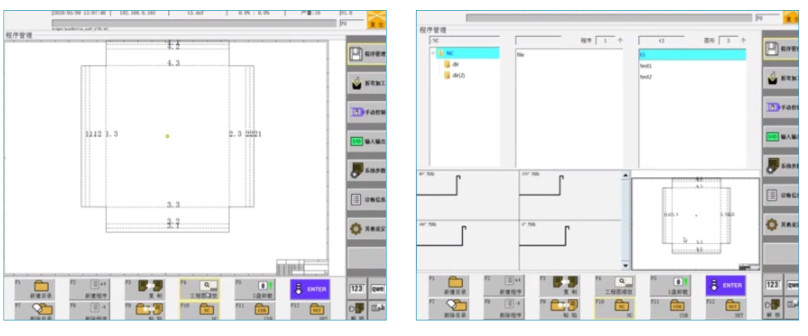
ຟັງຊັນການຂຽນໂປລແກລມສອງມິຕິ, ນໍາເຂົ້າຂໍ້ມູນການແຕ້ມຮູບ DXF ສອງມິຕິ, ແລະອັດຕະໂນມັດສ້າງຂະບວນການບິດ, ຂະຫນາດໂຄ້ງ, ມຸມໂຄ້ງ, ມຸມຫມຸນແລະຂໍ້ມູນອື່ນໆ.ຫຼັງຈາກການຢືນຢັນ, ການປຸງແຕ່ງການບິດອັດຕະໂນມັດສາມາດປະຕິບັດໄດ້
ບັນຊີລາຍຊື່ຂອງພາກສ່ວນຕົ້ນຕໍ
| ບໍ່. | ຊື່ | ຍີ່ຫໍ້ |
| 1 | ກອບ | ປັນຍາ |
| 2 | ເຄື່ອງມື | ປັນຍາ |
| 3 | ຫນ່ວຍບິດ | ປັນຍາ |
| 4 | ລະບົບ CNC | ປັນຍາ |
| 5 | ມໍເຕີເຊີໂວ | ປັນຍາ |
| 6 | ຄົນຂັບເຊີໂວ | ປັນຍາ |
| 7 | ລົດໄຟ | ປັນຍາ |
| 8 | ບານສະກູ | ປັນຍາ |
| 9 | ຕົວຫຼຸດ | ໄຕ້ຫວັນ |
| 10 | ເບກເກີ | Schneider |
| 11 | ປຸ່ມ | Schneider |
| 12 | ພາກສ່ວນໄຟຟ້າ | Schneider |
| 13 | ສາຍ | ຢີກູ |
| 14 | ສະຫຼັບຄວາມໃກ້ຊິດ | ໂອມຣອນ |
| 15 | ເກິດ | SKF/NSK/NAICH |
4) ການອອກແບບ, ການຜະລິດ, ການກວດກາແລະການຕິດຕັ້ງເຄື່ອງມືຂອງເຄື່ອງມືດັ່ງຕໍ່ໄປນີ້.
1, GB17120-1997
2, Q/321088JWB19-2012
3, GB14349-2011
ອາໄຫຼ່ແລະບັນຊີລາຍຊື່ເຄື່ອງມື
| ບໍ່. | ຊື່ | Qt. | ຂໍ້ສັງເກດ |
| 1 | ກ່ອງເຄື່ອງມື | 1 | |
| 2 | ຕິດຕັ້ງແຜ່ນ | 8 | |
| 3 | ຊັ້ນໃນຂອງ hexagon spanner | 1 ຊຸດ | |
| 4 | ປືນເຕີມນ້ຳມັນດ້ວຍມື | 1 | |
| 5 | ຄູ່ມືລະບົບ CNC | 1 | |
| 6 | ເປີດ spanner | 1 |





