ກະດານເຄິ່ງອັດຕະໂນມັດ Bender EMBC 1402
ສະເພາະຜະລິດຕະພັນ
| ບໍ່. | ຊື່ | ພາລາມິເຕີ | ໜ່ວຍ |
| 1 | ຄວາມຍາວສູງສຸດ | 1400 | mm |
| 2 | ຄວາມກວ້າງສູງສຸດ | 1400 | mm |
| 3 | ຕ່ຳສຸດຄວາມຍາວຂອງງໍ | 200 | mm |
| 4 | ຄວາມກວ້າງຂັ້ນຕ່ຳ | 260 | mm |
| 5 | ຄວາມຫນາສູງສຸດບິດ (MS,UTS410N/mm²) | 1 | mm |
| 6 | ຄວາມຫນາຕ່ໍາສຸດ (MS, UTS410N/mm²) | 0.5 | mm |
| 7 | ຄວາມສູງໂຄ້ງສູງສຸດ | ໑໗໐ | mm |
| 8 | ຮູບແບບການປັບຄວາມຍາວຂອງຄູ່ມືການກົດເທິງ | ||
| 9 | ການບໍລິໂພກພະລັງງານສະເລ່ຍ | 2.2 | KW |
| 10 | ນ້ຳໜັກ | 15 | T |
ລັກສະນະແລະໂຄງສ້າງຕົ້ນຕໍ
ໃນແງ່ຂອງການອອກແບບເຄື່ອງຈັກແລະການຜະລິດ, Hebei Hanzhi CNC Machinery Co., Ltd.ຕົ້ນຕໍແມ່ນສຸມໃສ່ຈຸດດັ່ງຕໍ່ໄປນີ້:
1. ແນວຄວາມຄິດການຕະຫຼາດທີ່ດໍາເນີນການປະຕິບັດຕົວຈິງແລະຊ່ວຍປະຢັດຜູ້ໃຊ້ທຸກ penny.
2. ແນວຄວາມຄິດການອອກແບບທີ່ເຊື່ອຖືໄດ້ຫຼາຍແລະຊັດເຈນ.
3. ວັດຖຸດິບທີ່ມີຄຸນນະພາບສູງ, ຊິ້ນສ່ວນທີ່ຊື້ແລະເຕັກນິກການປຸງແຕ່ງທີ່ສວຍງາມ.
4. ເນັ້ນຫນັກໃສ່ຄວາມງ່າຍຂອງການນໍາໃຊ້ແລະການບໍາລຸງຮັກສາແລະຄວາມປອດໄພ.
5. ອັດຕາການບໍາລຸງຮັກສາຕ່ໍາແລະຄ່າໃຊ້ຈ່າຍໃນການບໍາລຸງຮັກສາໃນອຸດສາຫະກໍາດຽວກັນ.
ກອບ
A. ການສ້າງແບບຈໍາລອງອົງປະກອບ 3D finite: ອີງໃສ່ແບບຈໍາລອງ 3D solid 3D ທີ່ຖືກພັດທະນາແລະອອກແບບ, ຮູບແບບອົງປະກອບ finite ແບບເຄື່ອນໄຫວແມ່ນຖືກສ້າງຂຶ້ນສໍາລັບການຄິດໄລ່.ຮູບແບບການພິຈາລະນາອົງປະກອບຕົ້ນຕໍກ່ຽວກັບການເຊື່ອມຕໍ່ການໂອນກໍາລັງ.ກໍາລັງຖືກໂອນໄປຫາຫມີໂດຍຜ່ານການເຊື່ອມຕໍ່ແລະຫຼັງຈາກນັ້ນການວິເຄາະຄວາມເຂັ້ມແຂງຂອງ bearing ແມ່ນດໍາເນີນ.
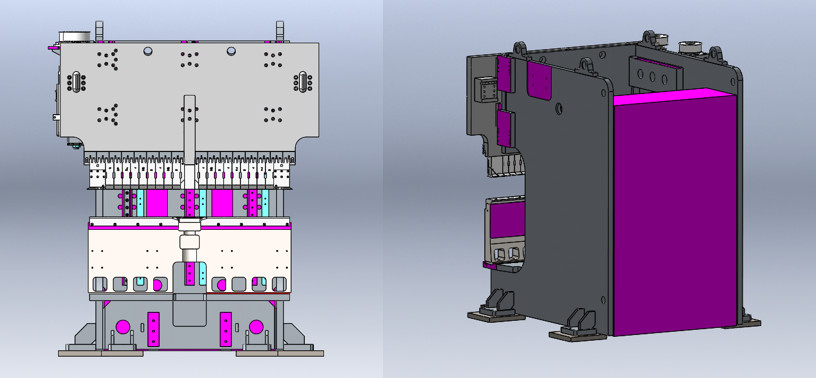
Fig. 1 Panel bender ການສ້າງແບບຈໍາລອງອົງປະກອບ Finite ແບບເຄື່ອນໄຫວຂອງເຄື່ອງຈັກທີ່ສົມບູນ
B. ການວິເຄາະຜົນການວິເຄາະຄົງທີ່: ເນື່ອງຈາກຄວາມໄວເຄື່ອງຈັກຊ້າ, ການວິເຄາະຄວາມເຂັ້ມແຂງສາມາດຫຼຸດລົງເປັນບັນຫາ static.ອີງຕາມການໂຫຼດການບີບອັດແຜ່ນແລະການໂຫຼດໂຄ້ງໃນທິດທາງຕັ້ງຂອງຫົວເຄື່ອງຕັດ, ຜົນໄດ້ຮັບຄວາມກົດດັນແລະການຜິດປົກກະຕິແມ່ນສະແດງໃຫ້ເຫັນຂ້າງລຸ່ມນີ້.ຄວາມກົດດັນສູງສຸດຈະປາກົດຢູ່ໃນຄໍຂອງຮ່າງກາຍທີ່ມີຄວາມກົດດັນສູງສຸດຂອງ 21.2mpa ແລະຄວາມຜິດປົກກະຕິສູງສຸດຈະປາກົດຢູ່ໃນສ່ວນເທິງຂອງຮ່າງກາຍທີ່ມີຄວາມຜິດປົກກະຕິສູງສຸດຂອງ 0.30mm.
ອີງຕາມຜົນການວິເຄາະອົງປະກອບ finite ຂອງກອບ, ເຫຼັກ Q345 ຖືກເລືອກເປັນວັດສະດຸ;ການເຊື່ອມໂລຫະກາກບອນໄດອອກໄຊໄດ້ຖືກຮັບຮອງເອົາ;ການປິ່ນປົວ tempering ໄດ້ຖືກປະຕິບັດເພື່ອລົບລ້າງຄວາມກົດດັນທີ່ເກີດຈາກການເຊື່ອມ;ດັ່ງນັ້ນຈຶ່ງຮັບປະກັນຄວາມຖືກຕ້ອງ, ຄວາມຫມັ້ນຄົງແລະຄວາມເຂັ້ມງວດສູງຂອງອຸປະກອນສໍາລັບການດໍາເນີນງານໃນໄລຍະຍາວ.
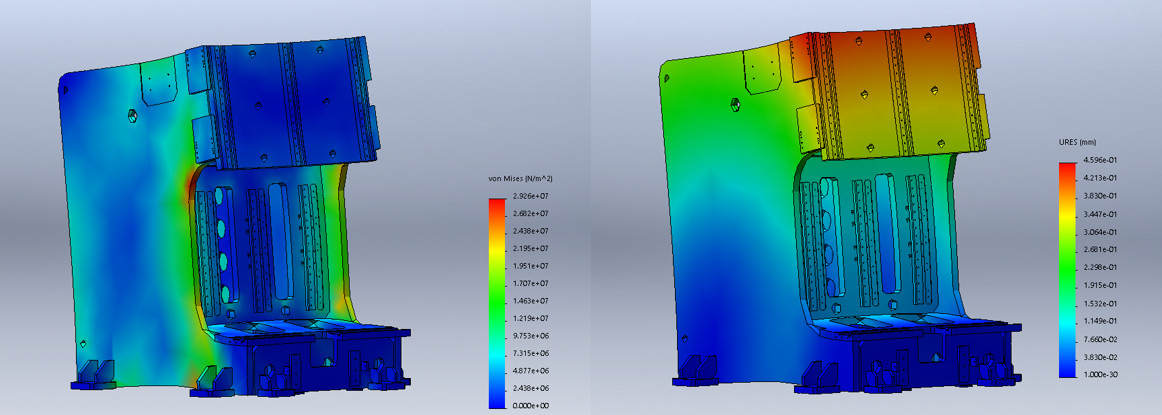
Fig. 2 ຜົນການວິເຄາະ deformation displacement ຄວາມກົດດັນຂອງກອບ
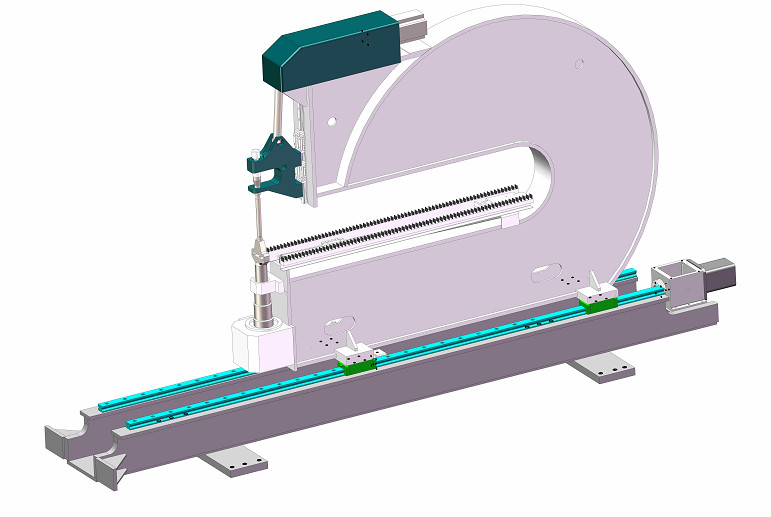
ram ເທິງ
ພາກສ່ວນນີ້ສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍ slider, screw ນໍາ torque ສູງ, reducer, ຄູ່ມື rail, servo motor ແລະອື່ນໆ.ໄດຕົ້ນຕໍແມ່ນຄວບຄຸມໂດຍ servo motor ແລະຮູບແບບການຄວບຄຸມແມ່ນການຄວບຄຸມ servo synchronous, ເຊິ່ງປະສິດທິພາບສາມາດຮັບປະກັນຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງ, ຄວາມໄວໄວແລະການຄວບຄຸມສູງ.ການຫລໍ່ລື່ນຂອງສະກູນໍາແລະທາງລົດໄຟຄູ່ມືຮັບຮອງເອົາການຫລໍ່ລື່ນອັດຕະໂນມັດ, ແລະນໍ້າມັນແມ່ນ 00#, ເຊິ່ງຮັບປະກັນຊີວິດການບໍລິການແລະຄວາມແມ່ນຍໍາຂອງ screw ນໍາແລະລົດໄຟນໍາພາສໍາລັບການດໍາເນີນງານເປັນເວລາດົນນານ.
ຜົນການວິເຄາະສະຖິດຂອງແຖບເລື່ອນດ້ານເທິງ: ແຜນວາດການເຄື່ອນທີ່ຂອງໄຕຂອງຕາຕະລາງເທິງສະແດງໃຫ້ເຫັນວ່າຄວາມກົດດັນສູງສຸດປາກົດຢູ່ໃນສ່ວນເທິງ, ຄວາມກົດດັນສູງສຸດແມ່ນ 152mpa, ຄວາມຜິດປົກກະຕິສູງສຸດຈະປາກົດຢູ່ໃນສ່ວນເທິງຂອງຕາຕະລາງເທິງ, ການຜິດປົກກະຕິສູງສຸດ. ແມ່ນ 0.15mm
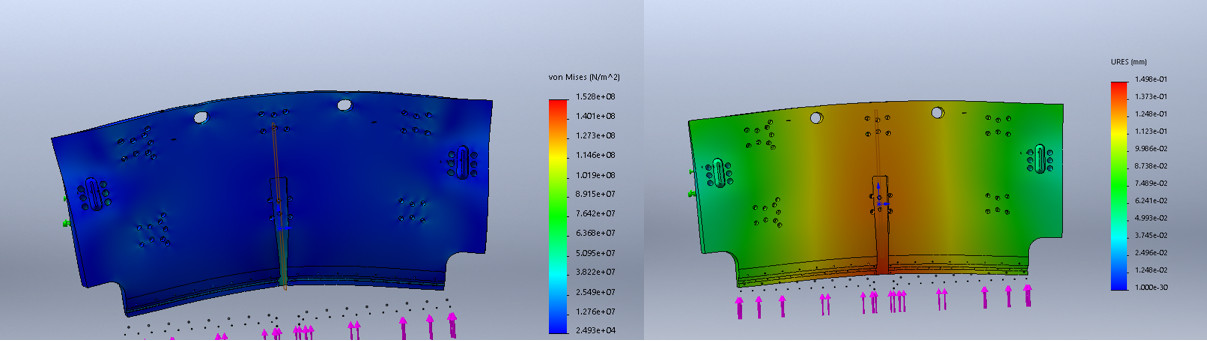
Fig. 3 ຜົນການວິເຄາະການຍ້າຍຄວາມກົດດັນຂອງ ram
ອີງຕາມຜົນການວິເຄາະອົງປະກອບ finite ຂອງ ram, ເຫຼັກ Q345 ຖືກເລືອກເປັນວັດສະດຸ;ການເຊື່ອມໂລຫະທີ່ມີໄສ້ CO2 ໄດ້ຖືກນໍາໃຊ້;ການປິ່ນປົວ tempering ໄດ້ຖືກປະຕິບັດເພື່ອລົບລ້າງຄວາມກົດດັນທີ່ເກີດຈາກການເຊື່ອມ;ດັ່ງນັ້ນຈຶ່ງຮັບປະກັນຄວາມຖືກຕ້ອງ, ຄວາມຫມັ້ນຄົງແລະຄວາມເຂັ້ມງວດສູງຂອງອຸປະກອນສໍາລັບການດໍາເນີນງານໃນໄລຍະຍາວ.
ຫນ່ວຍບິດ
ພາກສ່ວນຂັບເຄື່ອນພະລັງງານຂອງຫນ່ວຍໂຄ້ງແມ່ນຂັບເຄື່ອນໂດຍມໍເຕີ servo ໂດຍບໍ່ມີການມີສ່ວນຮ່ວມຂອງລະບົບໄຮໂດຼລິກ, ເຊິ່ງມີຂໍ້ດີຫຼາຍໃນການຫຼຸດຜ່ອນການສວມໃສ່ແລະ tear ຂອງອົງປະກອບແລະປະສິດທິພາບລະບົບສາຍສົ່ງ, ສອດຄ່ອງກັບນະໂຍບາຍການປະຫຍັດພະລັງງານແລະການປົກປ້ອງສິ່ງແວດລ້ອມທີ່ສະຫນັບສະຫນູນ. ໂດຍລັດ.
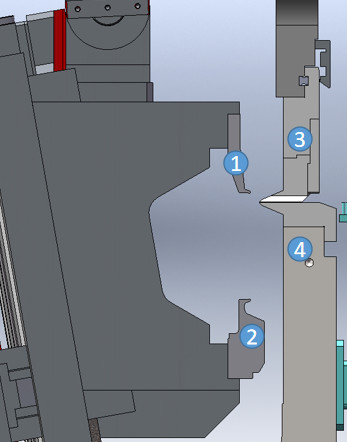
ອີງຕາມການຕັ້ງຄ່າຂໍ້ມູນແຜ່ນ, ລະບົບອັດຕະໂນມັດຄິດໄລ່ຕໍາແຫນ່ງຂອງມີດກົດເທິງ 3 ແລະຄວບຄຸມໄລຍະຫ່າງລະຫວ່າງມີດກົດເທິງ 3 ແລະມີດກົດຕ່ໍາ 4 ເພື່ອແກ້ໄຂແຜ່ນ;ອີງຕາມການກໍານົດລະບົບ, ບໍ່ວ່າຈະເປັນງໍນີ້ຂຶ້ນຫຼືລົງ, ມີດກົດຕ່ໍາ 2 ຫຼືມີດກົດເທິງ 1 ໄດ້ຖືກຄວບຄຸມເພື່ອຍ້າຍຢ່າງໄວວາໄປຫາຕໍາແຫນ່ງງໍ;ອີງຕາມມຸມການຕັ້ງຄ່າທີ່ແຕກຕ່າງກັນ, ມີດບິດໄດ້ຖືກຄວບຄຸມເພື່ອຍ້າຍໄປຫາຕໍາແຫນ່ງທີ່ຄິດໄລ່ໂດຍຜ່ານສູດການຄິດໄລ່ມຸມທີ່ມີສິດທິບັດເພື່ອໃຫ້ສໍາເລັດການບິດ.
ອີງຕາມວິທີການທີ່ແຕກຕ່າງກັນຂອງການງໍ, ສາມາດແບ່ງອອກເປັນມຸມໂຄ້ງ, ໂຄ້ງ arc ຂະຫນາດໃຫຍ່, ໂຄ້ງ flattening, ແລະອື່ນໆ, ເຊິ່ງມຸມໂຄ້ງແບ່ງອອກເປັນໂຄ້ງຂຶ້ນແລະໂຄ້ງລົງ.
ໜ່ວຍຂ່າວເທິງ
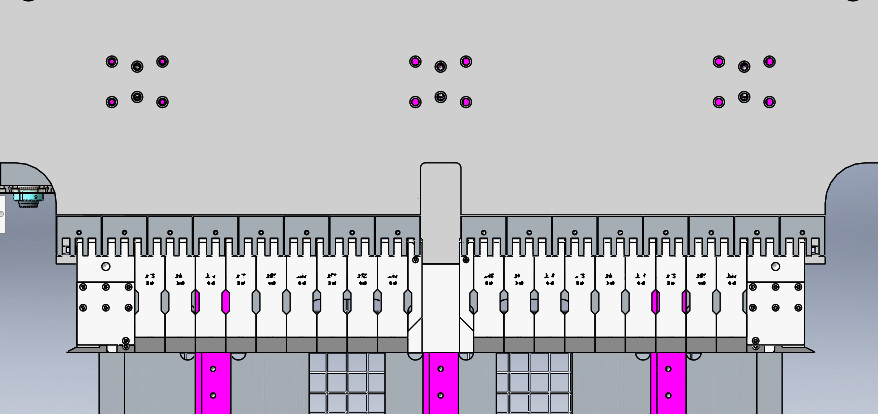
Fig.6 ຫນ່ວຍງານຫນັງສືພິມເທິງ
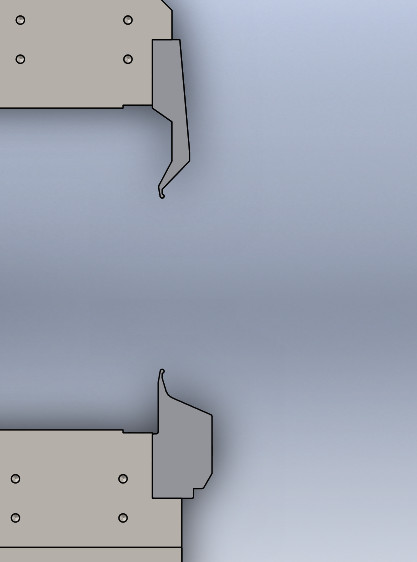
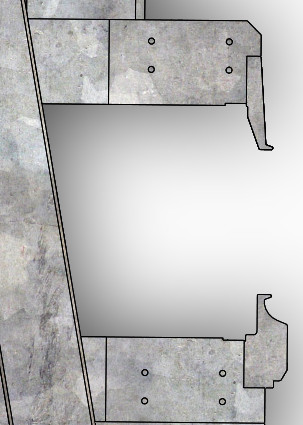
ຫນ່ວຍງານກົດເທິງ: ສ່ວນຫນຶ່ງຂອງຂະບວນການບິດທັງຫມົດ, EmbC ເຕັມສູນ servo ຫຼາຍຝ່າຍ bending ມີອຸປະກອນການກົດດັນເທິງພິເສດທີ່ສາມາດຕິດຕັ້ງແລະປັບດ້ວຍຕົນເອງສໍາລັບຄວາມຍາວແຜ່ນທີ່ແຕກຕ່າງກັນ.
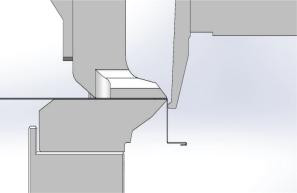
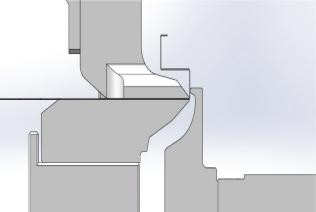
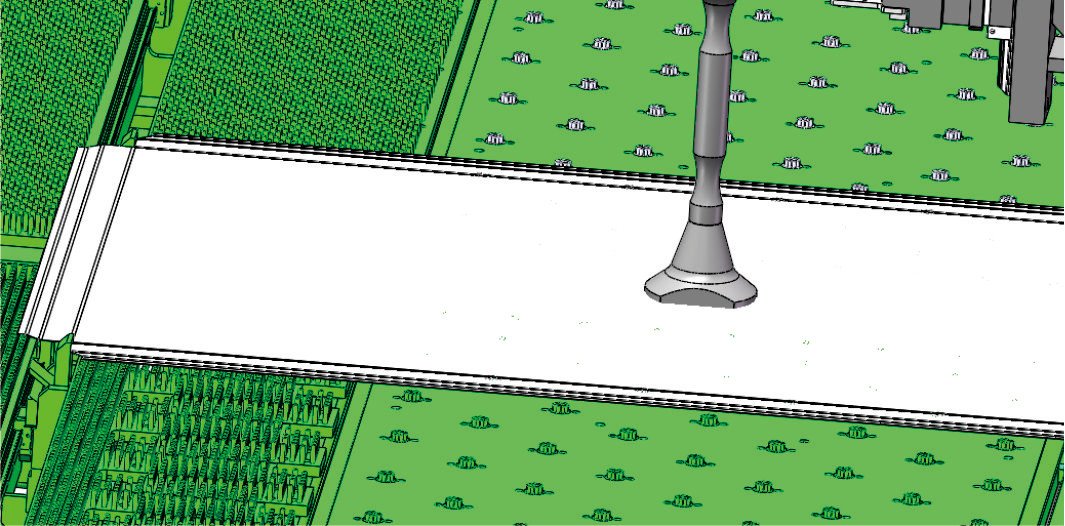
ເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຂອງກ່ອງໂຄ້ງການຫຼີກລ່ຽງ, ພວກເຮົາໄດ້ພັດທະນາການເສຍຊີວິດພິເສດ.ກ່ອນທີ່ຈະກົດ, ສ່ວນຫນຶ່ງຂອງການຫຼີກລ່ຽງການຕາຍແມ່ນຢູ່ໃນສະຖານະກ່ອນທີ່ຈະກົດຢູ່ໃນແຜນວາດແລະການໃຫ້ອາຫານເລີ່ມຕົ້ນ.ຫຼັງຈາກການໃຫ້ອາຫານ, ມັນຢູ່ໃນສະຖານະຫຼັງຈາກທີ່ກົດຢູ່ໃນແຜນວາດແລະການໂຄ້ງເລີ່ມຕົ້ນ.ຫຼັງຈາກງໍ, slider ເທິງຍ້າຍ.ໃນລະຫວ່າງການເຄື່ອນທີ່ຂອງແຖບເລື່ອນເທິງ, ສ່ວນ A ຈະຍ້າຍໄປສູ່ລັດໂດຍອັດຕະໂນມັດກ່ອນທີ່ຈະກົດ.ຫຼັງຈາກ slider ເທິງໄດ້ຍ້າຍໄປຕໍາແຫນ່ງທີ່ກໍານົດໄວ້, ການເຄື່ອນໄຫວຕໍ່ໄປຈະເລີ່ມຕົ້ນ.
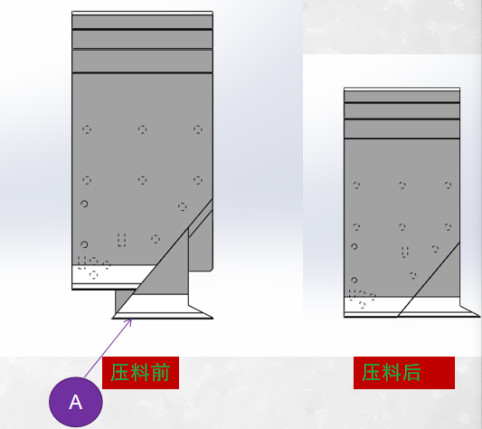
Fig.7 ການຫຼີກລ່ຽງກ່ອງບິດ
ເຄື່ອງມື
ເຄື່ອງມືບິດໄດ້ຖືກແບ່ງອອກເປັນເຄື່ອງມືບິດເທິງແລະເຄື່ອງມືບິດຕ່ໍາ.ເຄື່ອງມືງໍພິເສດສາມາດປັບແຕ່ງໄດ້ຕາມຄວາມຕ້ອງການທີ່ແຕກຕ່າງກັນຂອງລູກຄ້າ.
2. ຫນ່ວຍອາຫານຈານ:
ການເຄື່ອນໄຫວ, clamping ແລະການຫມຸນຂອງແຜ່ນໂລຫະແມ່ນຄວບຄຸມໂດຍຫຸ່ນຍົນ 1, fixture 2 ແລະແຜ່ນ rotating 3 ຕາມລໍາດັບ.ໃນລະຫວ່າງຂະບວນການເຄື່ອງຈັກທັງຫມົດ, ການໃຫ້ອາຫານຂອງແຜ່ນໂລຫະແມ່ນຄວບຄຸມໂດຍມໍເຕີ servo, ເຮັດໃຫ້ອັດຕະໂນມັດແລະການວາງຕໍາແຫນ່ງໄວ, ຫຼຸດຜ່ອນເວລາການເຄື່ອນໄຫວແລະເພີ່ມປະສິດທິພາບ.ຂໍຂອບໃຈກັບການປະດິດສ້າງໂຄງສ້າງແລະການນໍາໃຊ້ການຄວບຄຸມ servo ຢ່າງເຕັມທີ່, ການຍຶດແລະການຫມຸນຂອງແຜ່ນໂລຫະແມ່ນສາມາດຮັກສາຄວາມຖືກຕ້ອງຕະຫຼອດຂະບວນການເຮັດວຽກຂອງສູນ bending ຫຼາຍຝ່າຍ.ສໍາລັບ workpieces ສະລັບສັບຊ້ອນຫຼາຍ, ເຖິງແມ່ນວ່າ polygonal, ຄວາມຖືກຕ້ອງຂອງພືດຫມູນວຽນຢ່າງຕໍ່ເນື່ອງຂອງ 0.001 ສາມາດຮັບປະກັນ.
3. ຫນ່ວຍງານຕໍາແຫນ່ງແຜ່ນ:
ຫນ່ວຍຕັ້ງຕໍາແຫນ່ງຂອງແຜ່ນປະກອບດ້ວຍ pin positioning ຊ້າຍ, pin positioning ຂວາ, pin positioning ທາງຫນ້າແລະ pin positioning ຫລັງ;pins ວາງຕໍາແຫນ່ງຊ້າຍແລະຂວາຈັດຕໍາແຫນ່ງແຜ່ນໄປຊ້າຍແລະຂວາ.pin ຕໍາແຫນ່ງທາງຫນ້າແລະ pin ຕໍາແຫນ່ງທາງຫລັງຄວບຄຸມຕໍາແຫນ່ງດ້ານຫນ້າແລະຫລັງຂອງແຜ່ນແລະໃຫ້ແນ່ໃຈວ່າແຜ່ນແມ່ນຂະຫນານກັບມີດກົດເທິງແລະຕ່ໍາ, ເຊິ່ງຖືກນໍາໃຊ້ເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຂອງແຜ່ນ.
ຫນ່ວຍງານການຈັດຕໍາແຫນ່ງແຜ່ນສາມາດຕັ້ງແຜ່ນອັດຕະໂນມັດແລະເຮັດສໍາເລັດອັດຕະໂນມັດຂອງແຜ່ນເຫຼັກຫຼາຍດ້ານໃນເວລາດຽວ, ເຊິ່ງເຮັດໃຫ້ໄລຍະເວລາຂອງວົງຈອນງໍສັ້ນລົງຢ່າງຫຼວງຫຼາຍ, ຄວບຄຸມຄວາມຜິດພາດຂອງການຕັດຂອງແຜ່ນໃນເວລາງໍທໍາອິດແລະຮັບປະກັນຄວາມຖືກຕ້ອງຂອງການບິດ.
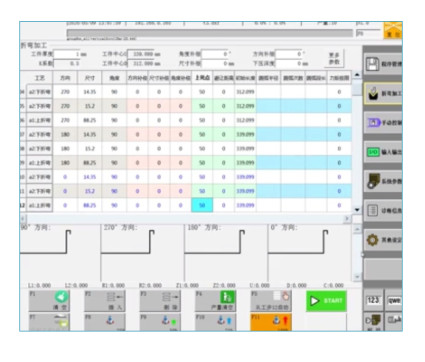
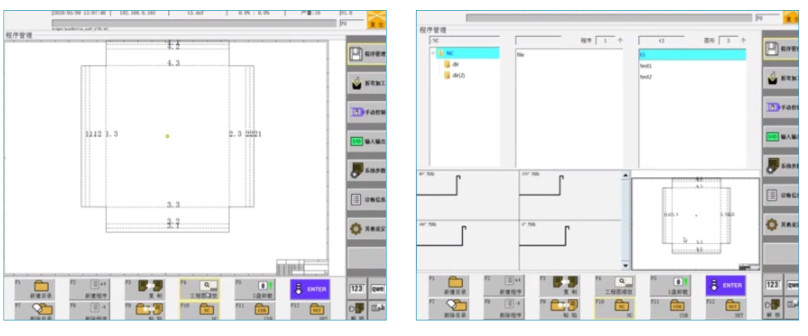
4.ລະບົບ CNC
A: ລະບົບ CNC ແລະຊອບແວທີ່ພັດທະນາຮ່ວມກັນສາມາດຖືກນໍາໃຊ້ແລະຄຸ້ມຄອງໄດ້ໄວແລະງ່າຍດາຍ
B: ລັກສະນະທີ່ສໍາຄັນ.
ກ).ວິທີການຄວບຄຸມລົດເມ EtherCAT ທີ່ມີຄວາມຕ້ານທານການແຊກແຊງສູງ
b) ສະຫນັບສະຫນູນການຂຽນໂປລແກລມໂດຍກົງ, ຂໍ້ມູນໂຄ້ງສໍາລັບແຕ່ລະຂັ້ນຕອນສາມາດເຂົ້າໄປໃນແບບຟອມ
c) ສະຫນັບສະຫນູນສໍາລັບການໂຄ້ງໂຄ້ງ
d) ການຄວບຄຸມ servo ໄຟຟ້າຢ່າງເຕັມສ່ວນ
e) ສະຫນັບສະຫນູນການຊົດເຊີຍການງໍ
f) ສະຫນັບສະຫນູນການດໍາເນີນໂຄງການສອງມິຕິລະດັບ
ຟັງຊັນການຂຽນໂປລແກລມ 2D, ນໍາເຂົ້າຂໍ້ມູນແຕ້ມ 2D DXF, ອັດຕະໂນມັດສ້າງຂະບວນການບິດ, ຂະຫນາດໂຄ້ງ, ມຸມໂຄ້ງ, ມຸມຫມຸນແລະຂໍ້ມູນອື່ນໆ.ຫຼັງຈາກການຢືນຢັນ, ການປຸງແຕ່ງການບິດອັດຕະໂນມັດສາມາດປະຕິບັດໄດ້
ບັນຊີລາຍຊື່ຂອງພາກສ່ວນຕົ້ນຕໍ
| ບໍ່. | ຊື່ | ຍີ່ຫໍ້ |
| 1 | ກອບ | ປັນຍາ |
| 2 | ເຄື່ອງມື | ປັນຍາ |
| 3 | ຫນ່ວຍບິດ | ປັນຍາ |
| 4 | ລະບົບ CNC | ປັນຍາ |
| 5 | ມໍເຕີເຊີໂວ | ປັນຍາ |
| 6 | ຄົນຂັບເຊີໂວ | ປັນຍາ |
| 7 | ລົດໄຟ | ປັນຍາ |
| 8 | ບານສະກູ | ປັນຍາ |
| 9 | ຕົວຫຼຸດ | ໄຕ້ຫວັນ |
| 10 | ເບກເກີ | Schneider |
| 11 | ປຸ່ມ | Schneider |
| 12 | ພາກສ່ວນໄຟຟ້າ | Schneider |
| 13 | ສາຍ | ຢີກູ |
| 14 | ສະຫຼັບຄວາມໃກ້ຊິດ | ໂອມຣອນ |
| 15 | ເກິດ | SKF/NSK/NAICH |
4) ການອອກແບບ, ການຜະລິດ, ການກວດກາແລະການຕິດຕັ້ງເຄື່ອງມືຂອງເຄື່ອງມືດັ່ງຕໍ່ໄປນີ້.
1, GB17120-1997
2, Q/321088JWB19-2012
3, GB14349-2011
ອາໄຫຼ່ແລະບັນຊີລາຍຊື່ເຄື່ອງມື
| ບໍ່. | ຊື່ | Qt. | ຂໍ້ສັງເກດ |
| 1 | ກ່ອງເຄື່ອງມື | 1 | |
| 2 | ຕິດຕັ້ງແຜ່ນ | 8 | |
| 3 | Inner hexagon spanner | 1 ຊຸດ | |
| 4 | ປືນເຕີມນ້ຳມັນດ້ວຍມື | 1 | |
| 5 | ຄູ່ມືລະບົບ CNC | 1 | |
| 6 | ເປີດ spanner | 1 |





